Mr.House
Voice-controlled home robot that holds conversations in Thai, sees its surroundings, and avoids obstacles.
01 // The_Problem
A university capstone project: build a physical robot that can hold a spoken conversation in Thai, describe what it sees, and navigate a room without bumping into things — with development possible even without constant access to the physical hardware.
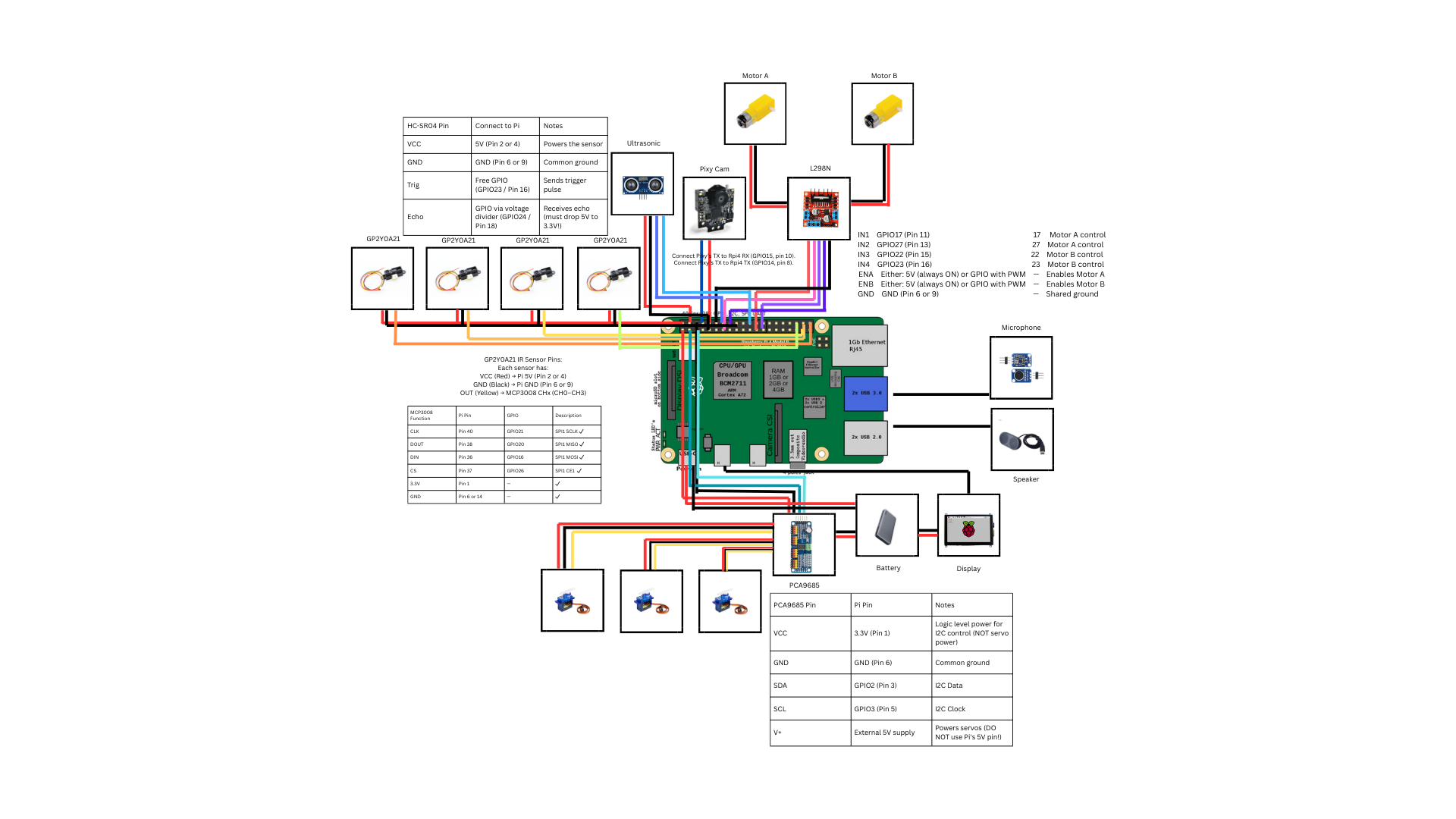
02 // Stack
03 // Key_Decisions
- MOCK_MODE — the system runs and is developable without the physical robot attached, swapping hardware I/O for simulated input/output. Designed for testability, not just demo day.
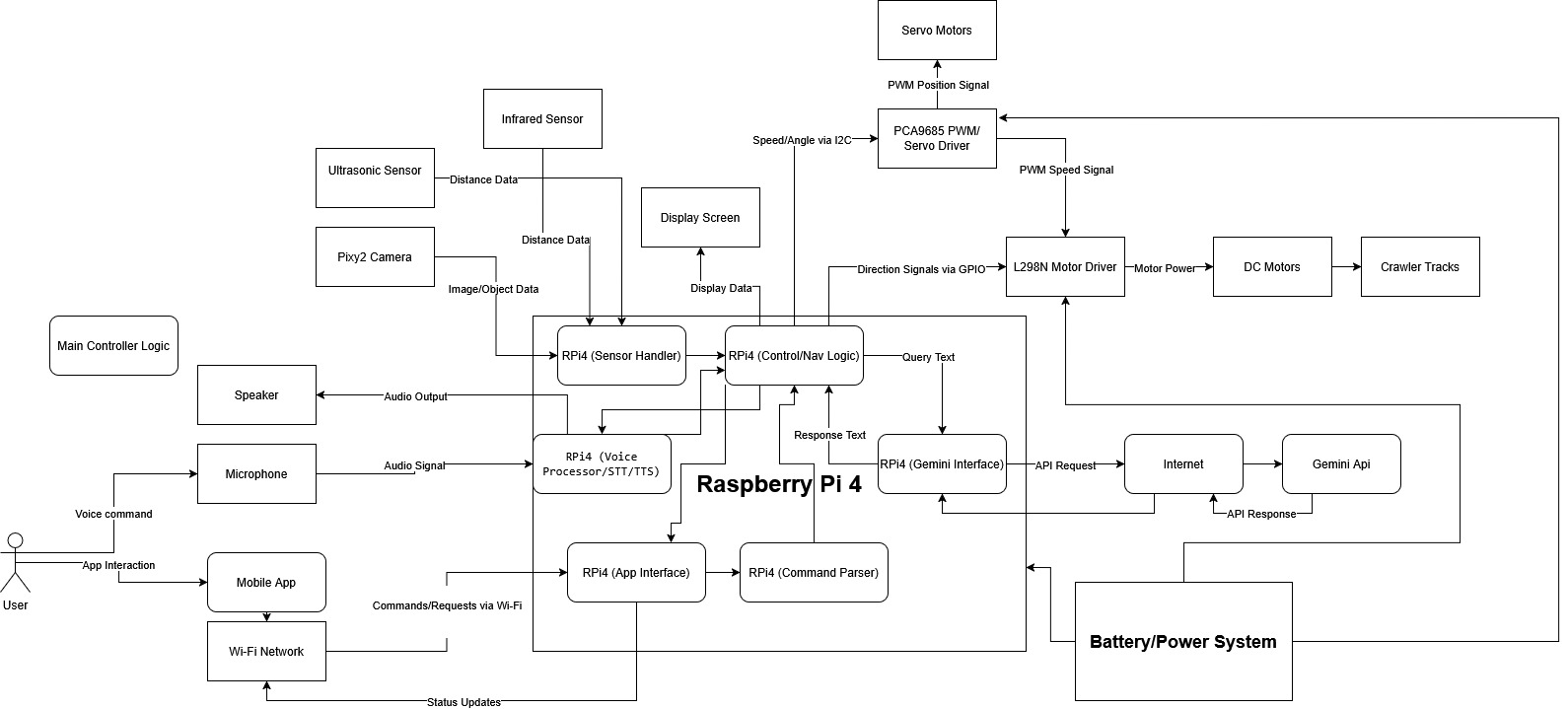
- Threaded concurrency runs movement, voice I/O, and vision analysis as simultaneous loops instead of one blocking loop.
- Gemini 2.0 used for both language (conversation) and vision (camera-based scene description) in the same project.
04 // Summary
Built a voice-controlled home robot that holds spoken conversations in Thai, describes what it sees through its camera, and steers itself around obstacles in real time — running Gemini 2.0 for both language and vision on a Raspberry Pi. A MOCK_MODE lets the full system run and be developed without the physical hardware attached, and three concurrent threads keep movement, listening, and vision running without blocking on each other.